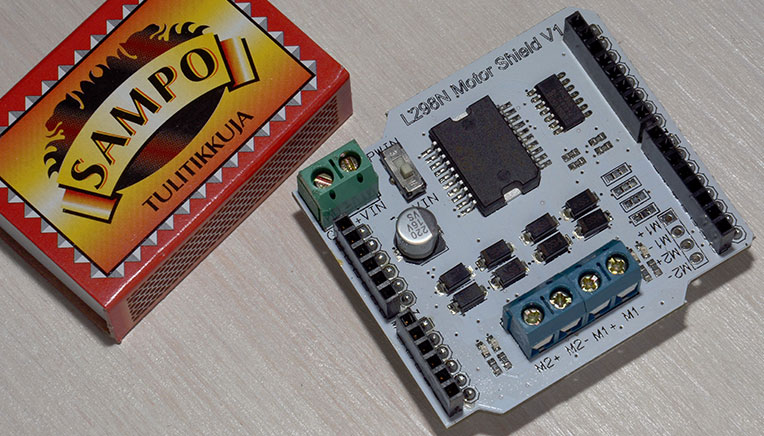
Это плата управления двигателями на микросхеме L298P. Она может управлять двумя двигателями. Для самодвижущейся установки начального уровня этого будет достаточно.Например, можно использовать такой мотор – DC 6V Gear Motor.
DC 6V Gear Motor
С двумя колесами ( третье – просто шарик, который вращается в любую сторону ) – один канал управляет левым колесом, другой – правым ( всего используется два мотораDC 6V Gear Motor ) . Для четырех колес – один канал управляет двумя правыми колесами, другой – двумя левыми (всего используется четыре мотора DC 6V Gear Motor) . Как это будет выглядеть на практике, узнаем позднее.
Плата управления двигателями L298N Motor Shield ( иногда такие платы называют также "шилд" ) подключается к основной плате ( Arduino ), которая выступает в качестве центра управления.
Технические параметры:Напряжение управления логикой, управляющий сигнал - 5V; Напряжение питания двигателей - от 6.5V до 12V ( если питание идет от основной платы ) и от 4.8V до 35V ( если используется внешний источник питания );
Максимальная сила тока на каждый канал - не более 2A;
В зависимости от используемого питания для платы управления двигателями, необходимо установить переключатель питания на плате L298N Motor Shield V1.2.
К зеленым разъемам подключается внешнее питание, в этом случае переключатель питания должен быть в положении PWIN.
Переключатель питания PWIN-VIN находится рядом с зелеными разъемами, он имеет только два положения.
Если питание идет от основной платы Arduino, переключатель должен находится в положении VIN и к зеленым разъемам ничего подключать не нужно.
К синим разъемам подключаются моторы.
M1 - первый мотор и M2 - второй мотор, для каждого необходимо подключить плюс и минус.
Управлять двигателем можно без специальных плат, с помощью только одной микросхемы, например L293D.

Leave a Reply